
Raspberry Pi
Approved Reseller
Approved Reseller
Approved Reseller
Approved Reseller

Los sensores ultrasónicos son unos de los más usados en prácticas de electrónica. Los puedes encontrar en robots que evitan obstáculos, detectores de presencia, medidores de nivel, en autos al estacionarse y más. En esta entrada veremos como puedes conectar un sensor HC-SR04 a tu Raspberry Pi Pico y cómo obtener medidas precisas con el.
Para esta práctica necesitarás
Lo primero que debes saber es que debes tener cuidado al conectar este sensor a tu Raspberry Pi Pico, ya que maneja voltajes que podrían dañarla. Sucede que el HC-SR04 maneja dos pines, uno de entrada (TRIG) y otro de salida (ECHO). El pin de salida maneja un voltaje de 5V, mientras que tu Raspberry Pi Pico, solo de 3.3V. Si conectas directamente el sensor a los pines de tu tarjeta, la corriente que fluye dañará el puerto de entrada.
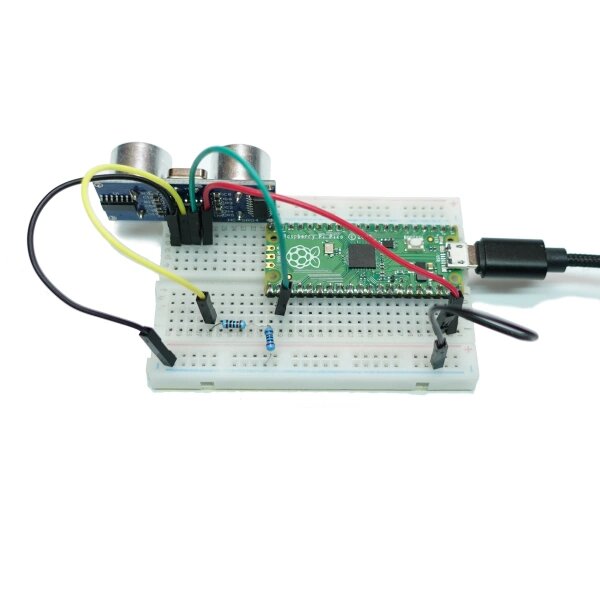
Para evitar esto, basta con construir un arreglo de resistencias que permita disminuir el voltaje de salida. Para lograrlo, conecta tu practica como se muestra en la imagen.

Ahora solo necesitas cargar tu programa a la tarjeta. A continuación te mostramos un ejemplo que toma la señal del sensor y devuelve la distancia entre este y el objeto.
from machine import Pin import time trig = Pin(17, Pin.OUT) echo = Pin(16, Pin.IN, Pin.PULL_DOWN) while True: trig.value(0) time.sleep(0.1) trig.value(1) time.sleep_us(2) trig.value(0) while echo.value()==0: pulse_start = time.ticks_us() while echo.value()==1: pulse_end = time.ticks_us() pulse_duration = pulse_end - pulse_start distance = pulse_duration * 17165 / 1000000 distance = round(distance, 0) print ('Distance:',"{:.0f}".format(distance),'cm') time.sleep(1)El programa a grandes rasgos emite un pulso a través de Trig, esperando a que se genera un eco que pueda ser leído de nuevo a través del pin Echo. Midiendo cuanto tarda en regresar la respuesta, podemos determinar la distancia del sensor y el objeto.

Para calibrar tu sensor puedes utilizar un flexómetro o regla graduada y verificar que las mediciones coinciden con tu instrumento. Recuerda que la superficie del objeto a medir debe reflejar bien las ondas sonoras. Si usas un trozo de alfombra o el ambiente es muy húmedo tus mediciones pueden salir afectadas.
Referencias: